针对超高压水射技术在混泥土的破碎和拆除方面还没有成熟应用的问题,根据超高压水射流破拆机器人实验样机,提出利用多学科多领域相互融合建模仿真软件 AMESim 对该样机液压系统进行仿真的方法。采用虚拟样机技术建立 3 维模型,利用 AMESim 软件对破拆机器人机械臂架驱动系统进行仿真模拟,获取其相关的重要参数。结果表明:该方法可为总液压系统和传动系统实验甚至后期优化提供参考,对改进破拆机器人的结构参数或提高其工作效率起着重要性意义。
0 引言
目前,我国建国初期建设的大部分大型混凝土建筑已经达到服役年限,需要对其进行修复和拆除,而采用传统机械式破碎技术容易造成周围建筑物损伤,甚至造成旧建筑物坍塌等严重现象,而且基于环境友好型社会建设的需要,传统的破碎拆除方式已经不再适应新社会的发展,只有采用超高压水射流的破碎技术才能有效解决这些问题。随着我国超高压水力破碎技术的快速发展[1],水射流清洗设备在国内已经得到广泛的应用,超高压泵已被研制出来,先进设备的出现给我国超高压水射流混凝破碎技术及设备的研发和制造打下基础[2]。笔者根据超高压水射流破拆机器人样机模型,提出利用多领域联合建模仿真软件AMESim 对该样机液压系统进行仿真的方法[3],获取破拆机器人执行破拆任务时系统的关键参数,具有非常重要的工程意义。
1 破拆机器人组成
超高压水射流破拆机器人由履带式移动底盘、控制系统、机械臂架和喷枪及托盘4 部分组成[4]。其 3 维模型如图 1 所示。
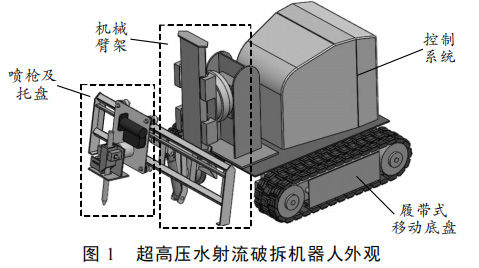
1) 履带式移动底盘。
履带式移动底盘是机器人执行工作的载体,采用液压驱动,具有良好的稳定性和动力输出,是进行破拆工作的可靠保障[5]。履带式移动底盘由液压驱动马达、减震机构、履带轮、履带和底盘架等部件构成。
2) 控制系统。
控制系统是破拆机器人的“大脑”,通过PLC控制器、压力传感器等硬件设备对机器人的移动以及破拆过程进行实时控制。
3) 机械臂架[6]。
机械臂架是喷枪托盘的搭载平台,包括 2 个移动和 2 个转动一共 4 个空间自由度,其不仅能为喷枪托盘提供一定的移动空间,而且能够调整喷枪托盘移动方位,扩大混凝土破拆范围,实现对不同方向的破拆。
4) 喷枪托盘。
2 机械臂架驱动机构建模
2.1 机械臂架工作原理
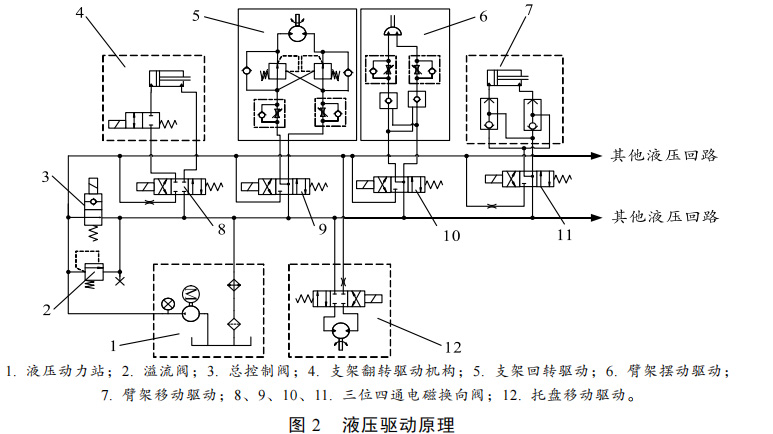
超高压水射流破拆机器人机械臂架的液压驱动原理图如图 2 所示。
液压动力站 1 由电机带动定量泵为系统提供液压动力,溢流阀 2 控制系统的最大工作压力,总控制阀 3 控制系统的工作状态。支架翻转机构 4 调控托盘的水平方位,控制喷枪入射角,提高混凝土的破拆效果。臂架摆动机构驱动 6 通过对摆动马达的控制,带动喷枪头左右摆动,扩大破拆范围。托盘驱动 12 由双向定量马达带动,通过齿轮齿条机构,控制托盘在支架上往复运动。
2.2 机械臂架仿真模型
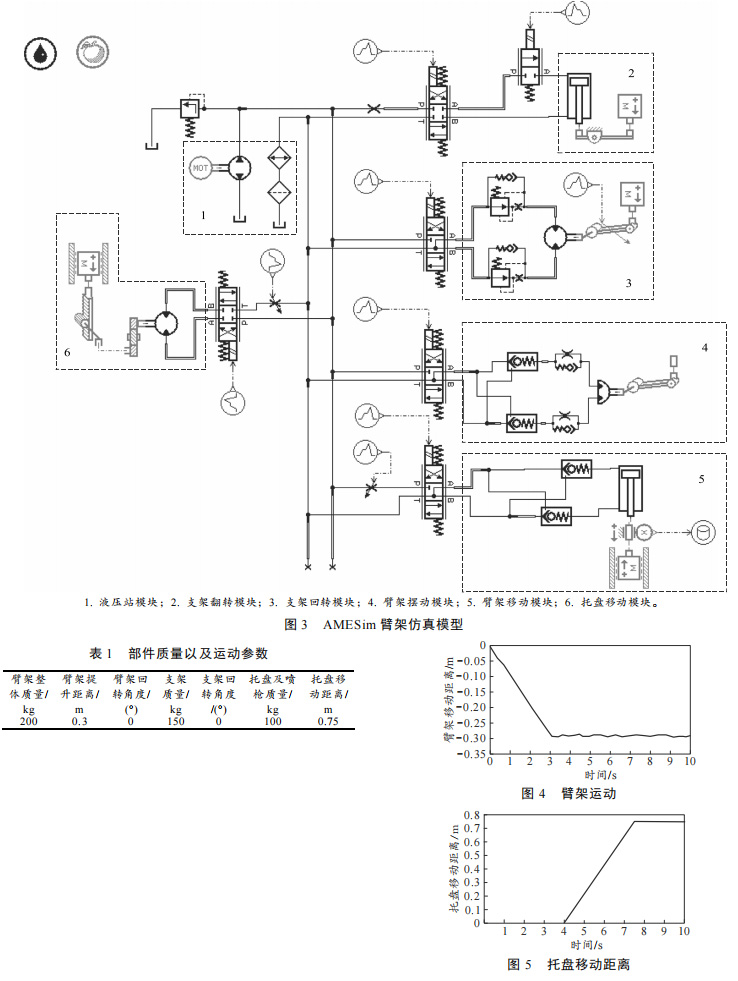
AMESim 在工程上的建模和仿真涉及学科多且领域广[8]。利用 AMESim 所包含的信号元件库、机械元件库和液压元件库 3 种模型库,结合液压驱动原理图 2 以及破拆机器人实际机械结构,建立了机械臂架 AMESim 仿真模型,如图 3 所示。
仿真模型参数设置:液压泵的排量设置为 18.7ml/r,采用额定转速为 1 500 r/min,功率为 7.8 kW
电动机带动。根据实际设计计算,系统工作压力采用 16 MPa,因此溢流阀压力设置为 16 MPa,各换向阀选用的是电液比例换向阀,利用信号元件控制,并省略了总控制阀。模型中的各三位四通阀信号输入范围为-1~1,0 表示中位。二位四通信号范围为0~1。为简化仿真,输入信号均取整数。3 系统仿真分析
超高压水射流破拆机器人可以实现多角度的混凝土建筑物进行破拆,而运用较多的是对水平方向混凝土路面进行破拆,选取该工作状态对机器人机械臂架以及托盘运动进行仿真,具有相对高的参考价值[9]。
路面破拆时喷枪与路面竖直方向夹角在 0°~10°。机械臂架各部件质量以及从初始状态运动到工作状态运动参数如表 1。
根据表 1,笔者在 AMESim 的参数模式下对模型元件的各项参数反复设置。根据样机设计,臂架移动模块的液压缸活塞直径为 32 mm,活塞杆直径 25 mm,总行程为 0.6 m,臂架整体所受阻力为 1 500N;小齿轮分度圆直径为 37.5 mm,模数 2.5,减速器减速比为 30,运行阻力取 1 000 N。仿真时间 10 s,臂架控制阀先开启 3 s,臂架移动到预定位置后关闭,间隔 1 s 后开启托盘移动阀,开启时间为 3.5 s,运动到预定位置后关闭。仿真结果如图 4—6。
根据图 4 分析可知,臂架控制阀开启后 3 s 内臂架整体运动了 0.29 m 左右,此后臂架整体在该位置
处于波动状态;根据图 5,托盘移动阀开启后,托盘在 3.5 s 内运动了 0.75 m;根据图 6,仿真开始时系
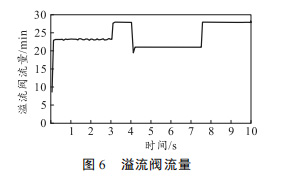
统溢流阀溢流流量在短时间内上升到 23 L/min,在臂架控制阀处于关闭状态,而托盘移动阀还未打开时,溢流阀溢流流量达到了 28 L/min,托盘移动阀开启后溢流阀溢流流量下降到 22 L/min,在系统仿真 7.5 s 时,2 个控制阀均处于中位状态,溢流流量再次上升到 28 L/min,并一直持续到仿真结束。
4 结束语
笔者主要介绍了超高压水射流破拆机器人的构成以及其所应用的液压控制系统,运用多学科多领域相互融合的建模仿真软件 AMESim,建立了超高压水射流破拆机器人的部分液压系统模型,通过该软件对破拆机器人工作时机械臂架和喷枪托盘的运动进行了模拟。模拟结果显示,笔者所设置的参数均能控制机器人部件以预期的速度达到预定位置。通过仿真得到了破拆时系统溢流阀的流量变化曲线,相关参数设定,对设备今后的研制提供重要参考。


 首页
首页
 产品中心
产品中心
 电话咨询
电话咨询
 售后服务
售后服务 售前服务
售前服务 关注公众号
关注公众号