

1. 破拆机器人组成
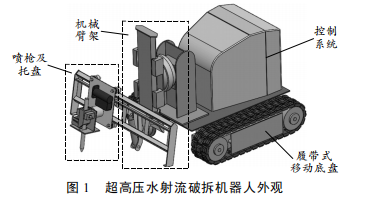
超高压水射流破拆机器人履带式移动底盘控制系统、机械臂架和喷枪及托盘4部分组成。
(1)履带式移动底盘
履带式移动底盘是机器人执行工作的载体,采用液压驱动,具有良好的稳定性和动力输出,是进行破拆工作的可靠保障,履带式移动底盘由液压驱动马达、减震机构、履带轮、履带和底盘架等部件构成。
(2)控制系统
控制系统是破拆机器人的大脑,通过PLC控制器、压力传感器等硬件设备对机器人的移动以及破拆过程进行实时控制。
(3)机械臂架
机械臂架是喷枪托盘的搭载平台,包括2个移动和2个转动一共4个空间自由度,其不仅能为喷枪托盘提供一定的移动空间,而且能够调整喷枪托盘移动方位,扩大混凝土破拆范围,实现不同方向的破拆。
(4)喷枪托盘
喷枪托盘是混凝土破拆的执行机构,超高压泵将液体水增加后通过喷枪喷射在混凝土上,超高压立柱状水可以将混凝土破开,通过内部挤压最后将其破碎。由于破碎时喷枪收到的反作用力过大,同时要进行往复摆动以提高破碎效果,因此喷枪采用了特殊设计的夹持机构进行固定,并由安装在托盘上的液压马达通过曲柄连杆机构带动其进行往复摆动,实现破拆动作。
机械臂架驱动机构建模
机械臂架工作原理
超高压水射流破拆机器人机械臂架的液压驱动原理
液压动力站1由电机带动定量泵为系统提供液压动力,溢流阀2控制系统的最大工作压力,总控制阀3控制系统的工作状态。支架翻转机构4调控托盘的水平方位,控制喷枪入射角,提高混凝土的破拆效果。臂架摆动机构驱动6通过对马达的控制,带动喷枪头左右摆动,扩大破拆范围。托盘驱动12由双向定量马达带动,通过齿轮齿条机构,控制托盘在支架上往复运动。
AMEsim在工程上的建模和仿真涉及学科多且领域广,利用AMEsim所包含的信号元件库、机械元件库和液压元件库3种模型库,结合液压驱动原理以及破拆机器人实际机械结构,建立了机械臂架AMEsim仿真模型。仿真模型参数设置,液压泵的排量设置为18.7ml/r。采用额定转速为1500r/min,功率为7.8kw电动机带动。根据实际设计计算,系统工作压力采用16MPa,因此溢流阀压力设置为16MPa,各种换向阀选用的是电液比例换向阀,利用信号元件控制,并省略了总控制阀。模型中的各三位四通阀信号输入范围-1~1,0表示中位。二位四通信号范围为0~1.为简化仿真输入信号均取整数。
系统仿真分析
超高压水射流破拆机器人可以实现多角度的混凝土建筑物进行破拆,而运用较多的是对水平方向混凝土路面进行破拆,选取该工作状态对机器人机械臂架以及托盘运动进行仿真,具有相对高的参考价值,路面破拆时喷枪与路面竖直方向夹角0°~10°
总结:运用多学科多领域相互融合的建模仿真软件AMEsim,建立了超高压水射流破拆机器人的部分液压系统模型,通过该软件对破拆机器人工作时机械臂架和喷枪托盘的运动进行了模拟,模拟结果显示,所设置的参数均能控制机器人部件以预期的速度达到预定位置,通过仿真得到了破拆时系统溢流阀的流量变化曲线,相关参数设定,对设备今后的研制提供重要参考。
 首页
首页
 产品中心
产品中心
 电话咨询
电话咨询
 售后服务
售后服务 售前服务
售前服务 关注公众号
关注公众号